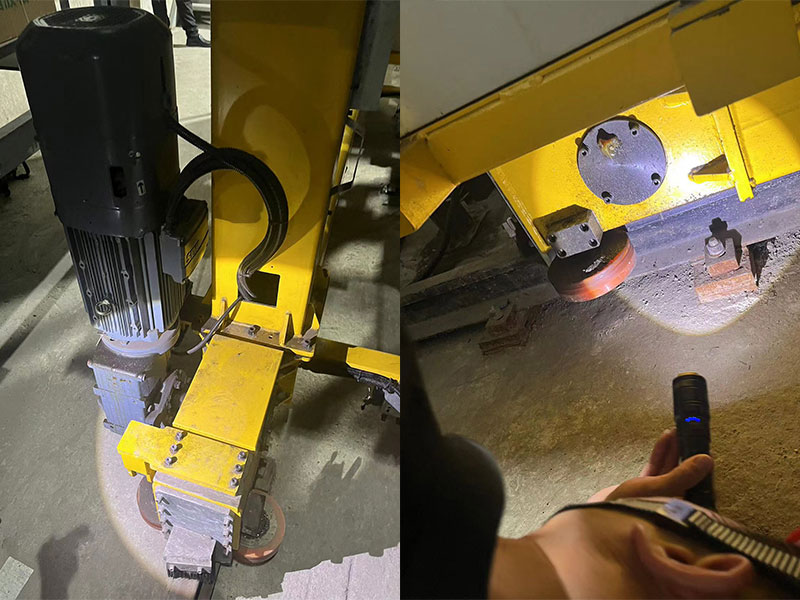
AGV的轮子可以按两个维度进行分类,一个是轮子数量,一个是驱动轮的种类。轮子数量:有三轮 四轮 多轮。三轮:一般一个驱动兼转向轮,两个固定从动轮(分布在车体轴线的两边)。这种车型可以前进、后退、左右转弯(转角小于90°)。因三轮结构的抓地性好,对地表面要求一般,适用于广泛的环境和场合。 但是该种车自动运行时只能单向行驶,转弯时后轮中点轨迹偏离导引线轮迹呈曳物线四轮:两个从动自由轮,转弯靠两个驱动轮之间的速度差实现。这种车型可以前进、后退、左右转弯(转角大于90°)、原地自旋,转弯的适应性比单驱动强。但是此种对地表面平整度要求苛刻,适用范围受到一定限制;此外结构复杂。多轮驱动车型,这种车型可以前进、后退、全方位行驶。应用于重载行业输送,结构复杂,成本较高。驱动轮种类仅以我接触的两种说明。舵轮:舵轮是一种集成了驱动电机、转向电机、减速机等一体化的机械结构。相比于差距,舵轮有个很重要功能是可以横移。差速:差速驱动是一个两轮驱动的系统,而且每个轮子都带有独立的执行机构(如直流电动机)。机器人的运动状态是每个独立车轮运动的总和,驱动轮通常被安装在机器人的两边,而且正对前方。